RunPodテンプレート”Kohya_ss GUI RTX 5090”で”LoRA学習”

本記事では、クラウドGPUのRunPod内で、
”Kohya_ss GUI RTX 5090”というテンプレートを使用して、
JupiterLabのアップローダーを使用してファイルをアップロードする方法と、
workspaceでフォルダ管理をする方法と、
”LoRA学習”をする方法を解説しています。
RunPodの基本的な使用方法については、こちらの記事で解説しています。
あわせて読みたい
【RunPodの料金と使い方】Stable Diffusionなどで画像生成やLoRA学習をする方法【②実践編】 RunpodでStable Diffusion系画像生成やLoRA学習をする方法 Stable DiffusionやLoRA学習では、長時間GPUをフル稼働させるため、発熱や電源の安定性が大きな課題になりま…
目次
このテンプレートの構成
RunPodテンプレート(Kohya_ss GUI RTX 5090)は、Kohya_ssのGUI(Web UI)を含んだ、学習用の統合環境になっています。
このテンプレは、GUI操作でLoRA学習などが可能になっており、Jupyter Labとの連携が可能で、GPUまで指定されている!ということですので使用してみたいと思います。
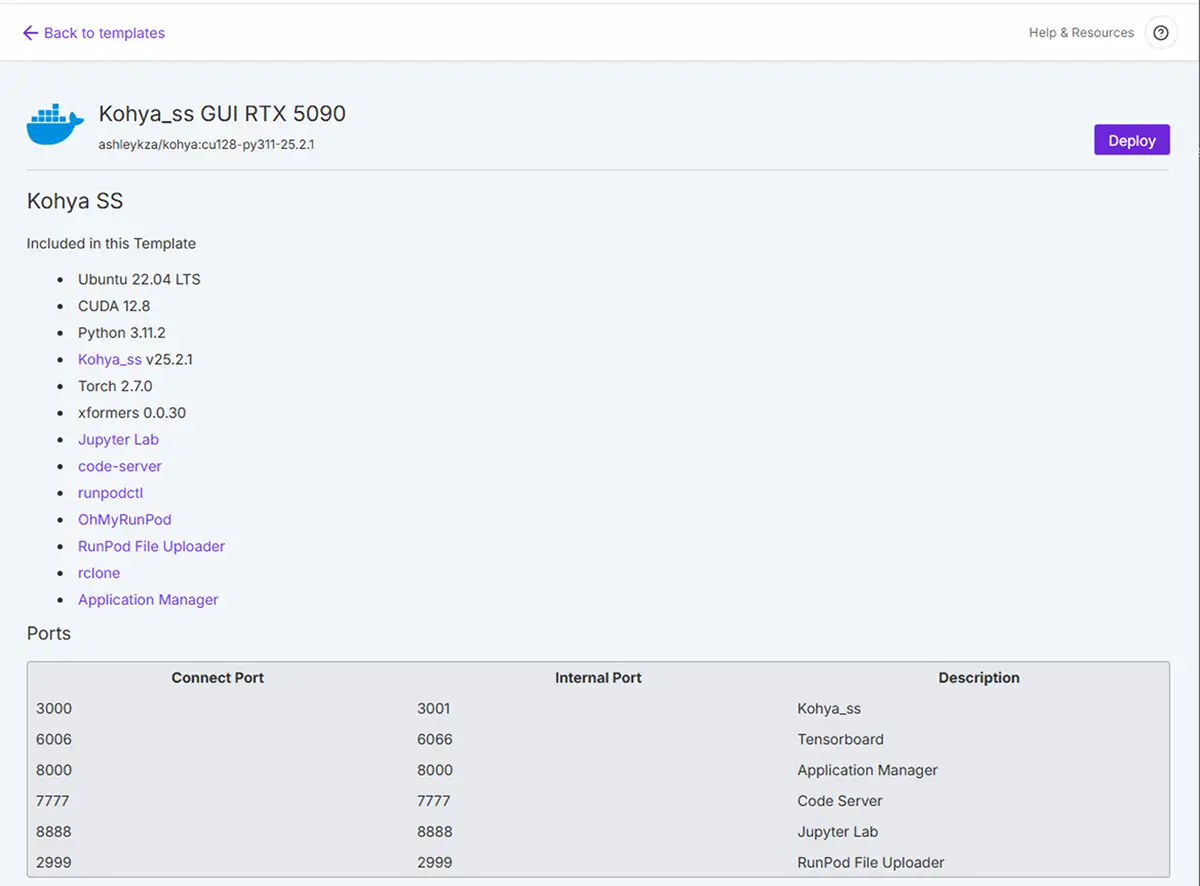
| 項目 | 内容 |
|---|---|
| OS | Ubuntu 22.04 LTS |
| CUDA | 12.8(最新) |
| Python | 3.11.2 |
| Kohya_ss | v25.2.1(2025年対応) |
| PyTorch | 2.7.0 |
| GUI | Kohya_ss Web UI付き(localhost:7860) |
| その他 | code-server、Jupyter Lab、rclone、RunPod File Uploader など含む |
RunPodでのKohya_ss GUIの基本的な使用手順
Kohya_ss GUI RTX 5090では、GPUを迷わなくていいので良いですね。今回は、Network Strageを使用せずに軽量な(5から10枚程度)学習を行っていきたいと思います。永続ストレージを使用する場合は、事前にStorageでNetwork Volumeを設定し、Deploy画面でVolumeを選択して始めます。
Network Strage(永続ストレージ)の設定方法はこちらをクリックしてください
1. 使いたいGPUと同じリージョン(データセンター)を選ぶ
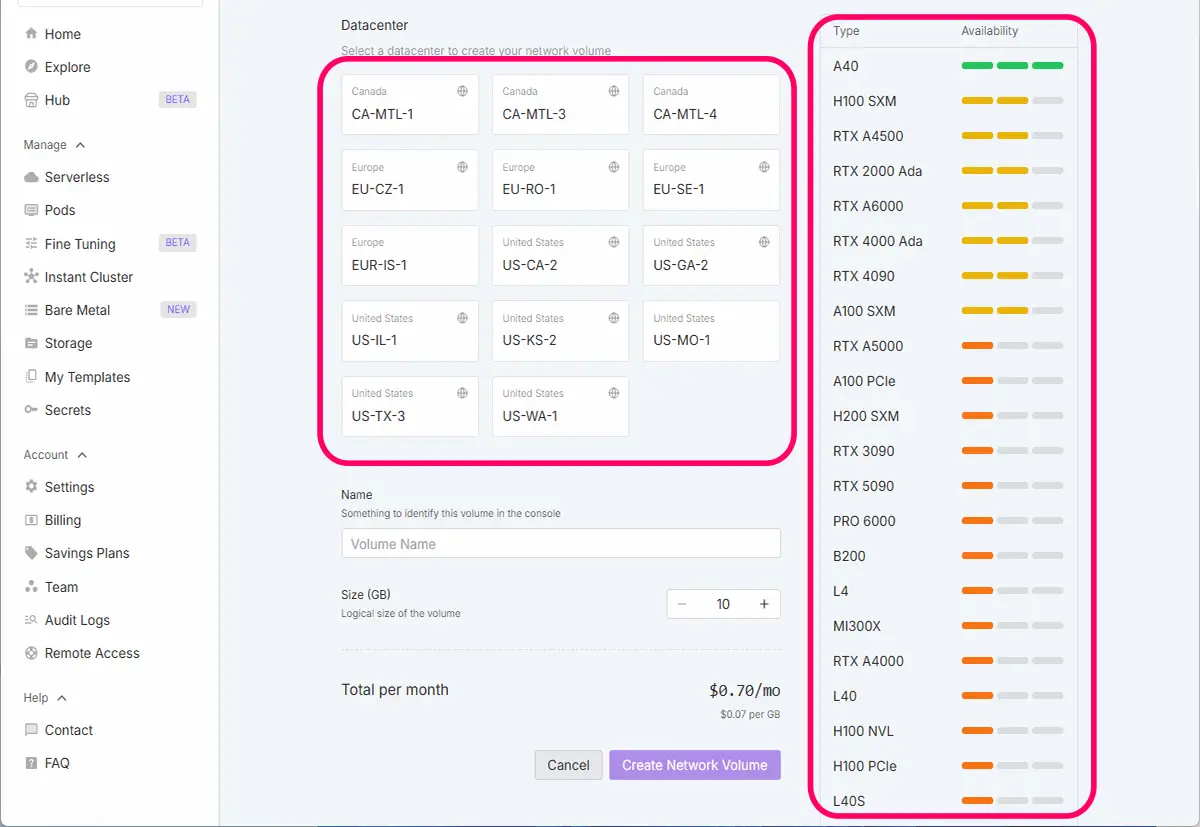
左側のStorageから、New Network Volumeをクリックします。
すると以下の画面が出て来ます。
- 一番大事なポイントです。
- 例:RTX 5090を使いたい → そのGPUが使えるデータセンターを調べて、同じ場所にボリュームを作成する
- 違うリージョンだとPodに接続できません。
※注意:L4、T4、A10G、A100などは、幅広く対応するGPUです。RTX5090などは新しいので、テンプレートを使用する場合は注意が必要です。
2. 頻繁に起動するGPUが安定して空いているリージョンを選ぶ
- 「混雑していてなかなかGPUが借りられない」となると非効率なので、なるべく空きやすいリージョンを選ぶのも手。
- 時間帯によって混雑が変わるので、ご自身が作業する時間帯に空きがある地域が理想です。
3. 自身の物理的な居住地に近いリージョン(必須ではない)
- 通信速度を気にする場合のみですが、ネットワーク経由で学習データや画像をアップロード/ダウンロードする際に速度に影響が出ることがあります。
- 日本在住なら**アジア圏(例:Singaporeなど)**が比較的速いです。
- ただし、これは学習性能には影響しません(あくまで転送速度のみです)。
ネットワークボリュームを作成するデータセンターを選びます。データセンターを選択すると、使用できるGPU一覧が表示されます。

使用したいGPUが使えるリージョンを選択し、Volume Nameを付け、サイズ(GB)を設定し、Create Network Volumeを押すと自分の永続ボリュームが作成されます。
ボリューム(永続ストレージ)の選び方基準
最低限のLoRA学習なら20GBでもOK、余裕があれば30〜40GBが安心。
| 内容 | 容量の目安 |
|---|---|
| 学習画像(100〜200枚) | 100MB〜500MB程度 |
| .txtタグファイル | 数MB未満 |
| モデル本体(SD1.5やLoRA) | 2〜7GB程度(1モデルあたり) |
| 出力されたLoRAファイル | 50MB〜200MB/個 |
| 学習キャッシュ・ログ | 数百MB〜2GB程度 |
設定目安
| 項目 | 推奨 |
|---|---|
| 最低限 | 20GB(削除に注意) |
| おすすめ | 30〜50GB(複数回学習する・ベースモデル複数持つなら) |
| 安心運用 | Auto-shutdown設定 + 永続ストレージあり |
具体的なポイント
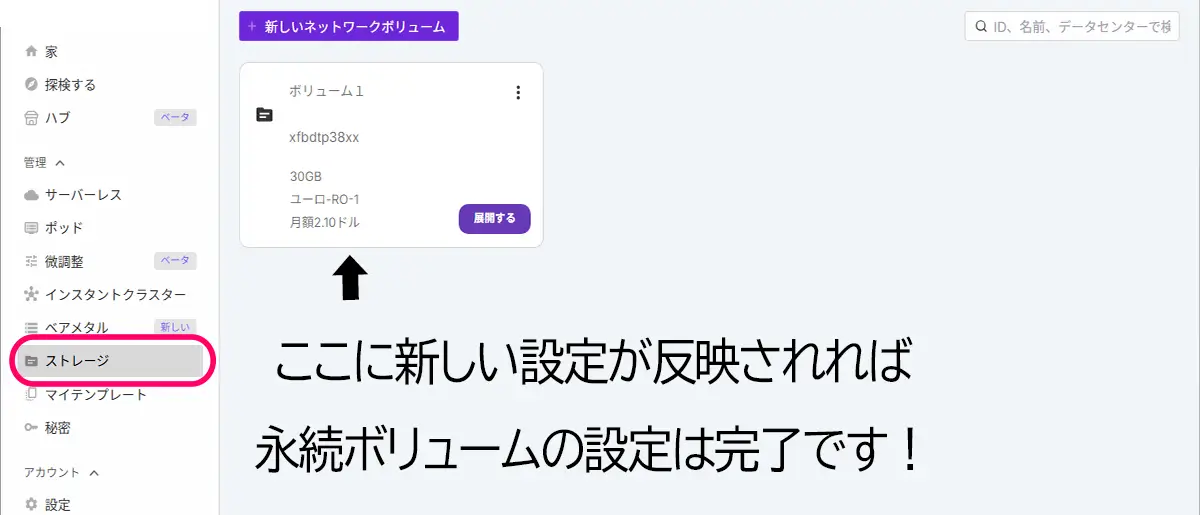
作成したストレージは、ストレージに反映されます。(反映に、少し時間が掛かる場合があります。)
RunPodの「永続ストレージ(Network Volume)」は、作成した時点から削除するまで、ずっと課金され続けます。
※課金はPodが停止中でも発生します。
- Podを停止、削除しても、永続ストレージが残っていれば料金は発生し続けます
- 料金は GB単位/時間あたり で加算されます(例:$0.0001/GB/時間 など)
ストレージ課金を止めたい場合
「永続ストレージ(Network Volume)」自体を削除する
- RunPodの左メニューから「Volumes」を選択
- 削除したいストレージの右側にある「︙」メニューをクリック
- 「Delete」を選択
削除時の注意点
- 削除すると中のデータ(学習モデル、学習ログ、画像など)もすべて消えます
- rcloneや外部ストレージと連携してバックアップしてから削除するのが安心です
| 状況 | おすすめ対策 |
|---|---|
| 一時的に使わない | PodだけStop(停止)、Delete(削除)はしない。 |
| しばらく使う予定がない | 必要なデータをバックアップし、Delete(削除)Volume削除 |
| コストを最小限にしたい | 作業の都度Delete(削除)、Volumeを作成・削除 |
Stop(停止)だけすれば、GPU課金は止まります。次回Startすれば、再び同じ環境でタスクを継続できます。
※Network Strageを使用せず学習する場合は一気に作業をする必要があります。Podを停止するとデータが消えます。ご注意ください。
Deploy➡RTX5090➡Deploy on Demandで、Podを立ち上げます。
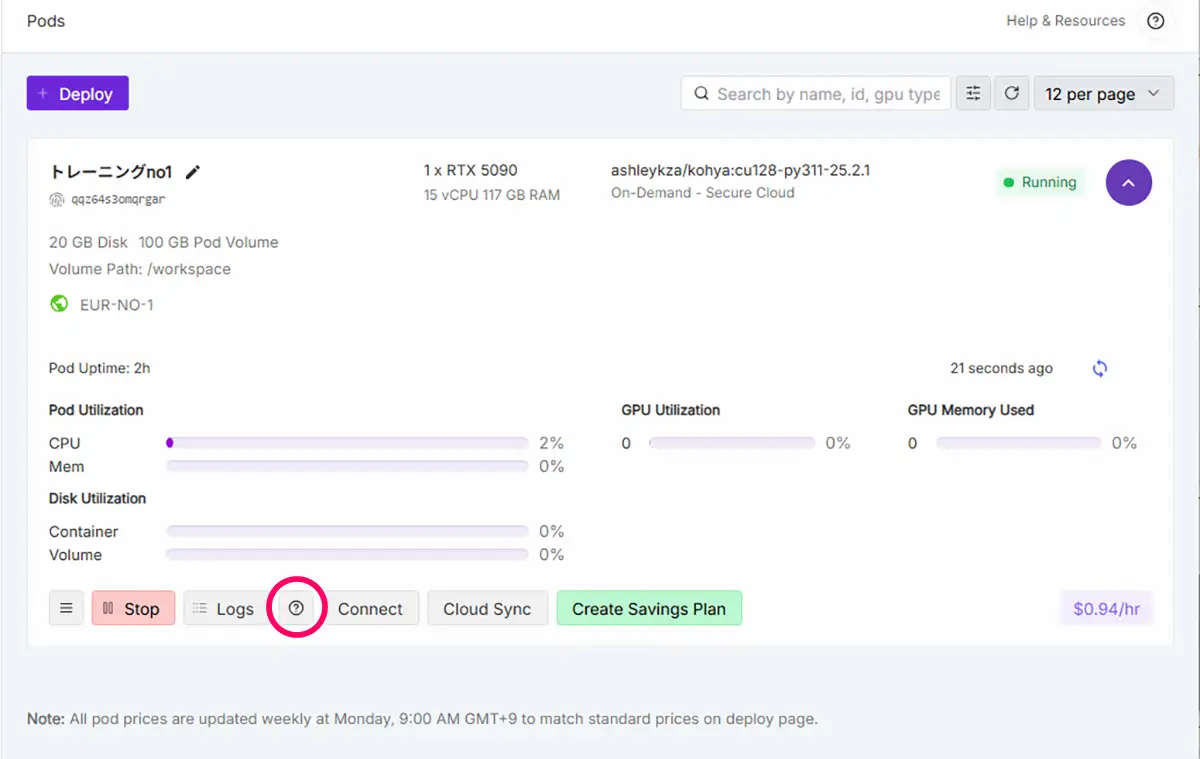
※はてなマークテンプレート内のツールのスペックと、ポート番号が確認できます。
①インスタンス起動
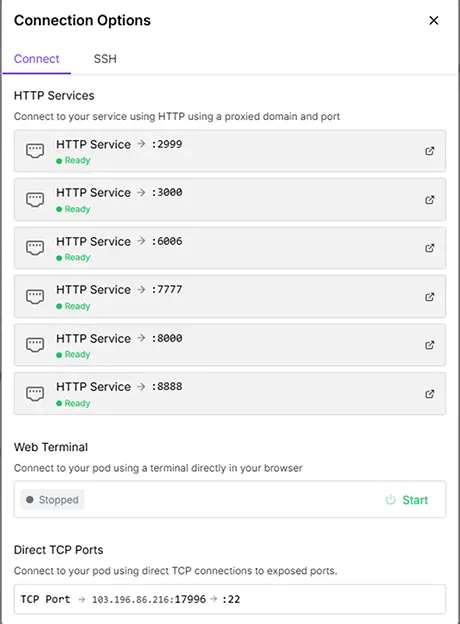
- RunPodでインスタンスを起動後、しばらく待つと「Web Interface」欄にアクセス可能なリンクが表示されます。
今回は、 - Kohya_ss(3000)、
- Jupyter Lab (8888)、
- codesaver(=workspace)(7777)を開きます。
codesaverは、Notebookの自動保存や履歴保存です。Pod停止後も保存される永続ストレージ。出力データやモデルの保存場所として使用します。codesaver(=workspace)(7777)と、Jupyter Labは、連携しています。
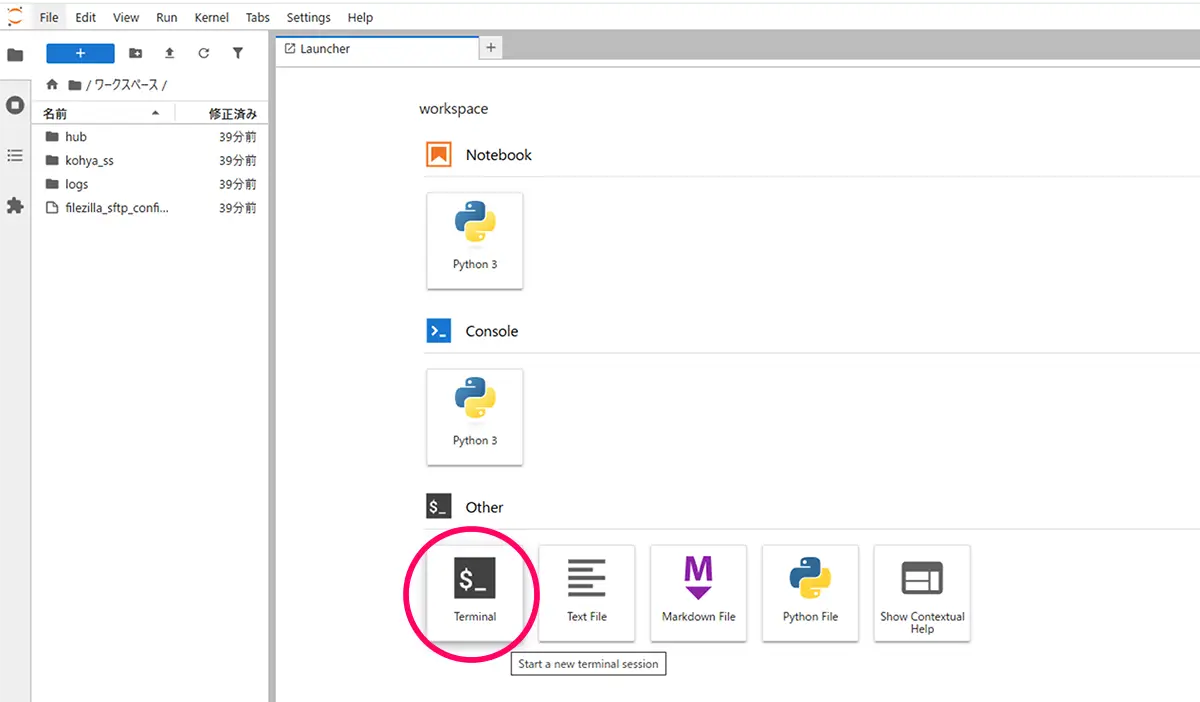
※Jupyter Lab (8888)と、codesaver(=workspace)(7777)は、どちらもファイル管理が出来ますが、Jupyter Lab (8888)はアップローダー付きで、codesaver(=workspace)(7777)は、ファイルの移動などがドロップ&ドラックで出来るという特性から、codesaver(=workspace)(7777)の方が、実際のファイル管理に適していると思います。
Application Manager(8000)は、「どのアプリがどこで動いてるか」を一覧で見やすく表示するための便利機能です。必要な方は立ち上げて下さい。
FileUploader(2999)は、JupiterLabでファイルのアップロードが出来るので、お好みで。
TensorBoard(6006)は、こちらも任意です(学習の視覚化に使いたい時)
Jupyter Lab→ Notebook操作やコマンド実行用(httpポート)kohya_ss GUI→ LoRA学習などを操作するWeb UI(通常http://<podアドレス>:7860)
②Kohya_ss Web UIを開く
- 「Web Interface」欄の
kohya_ss GUIをクリック - Kohya_ssのトップ画面が開く(カテゴリメニューあり)
③Kohya_ss GUIの構成(メニュー)
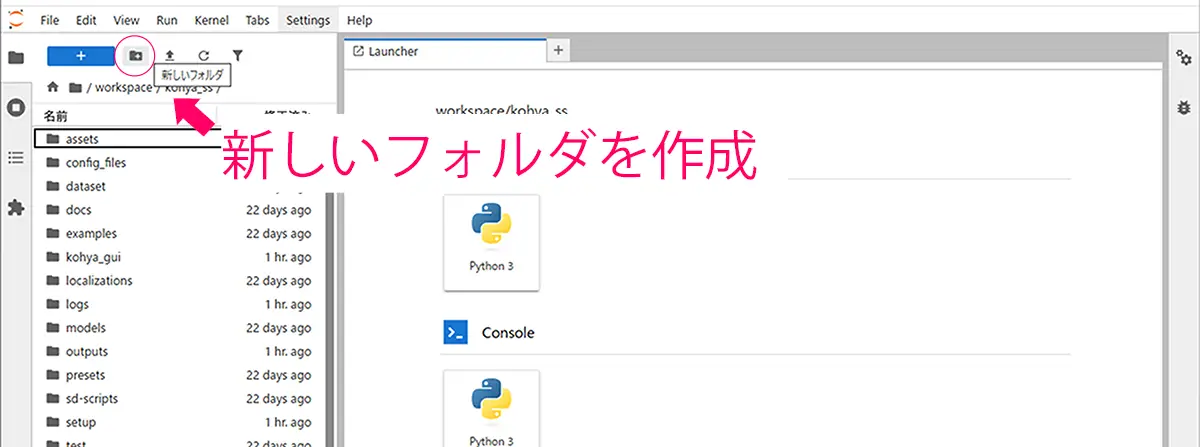
以下のような画面構成になっています(RunPod用テンプレート(kohya_ssベース) では、以下のような前提フォルダ構成になっていることが多いです)
/workspace/kohya_ss
├── dataset
│ ├── images ← 学習用画像を置く標準パス
│ └── output ← 学習中のログや一時ファイルなど
├── models ← モデルの保存先
├── output ← 学習後のLoRA出力(こっちが最終成果物)
└── train ← 独自に使うならここでもOK(手動管理)JupiterLabで、workspace➡Kohya_ss➡dataset内に学習用画像フォルダを置きます。
学習用フォルダの作成方法は、以下の記事をご覧ください。
あわせて読みたい
【自作イラストをLoRA化】画像とキャプション(テキストタグ)の準備からフォルダ構成まで徹底解説 学習用データセットの作り方 LoRA(Low-Rank Adaptation)は、既存のAIモデルに対して、自分のイラストや作風を学習させられる技術です。でもいざ始めようとすると── 「…
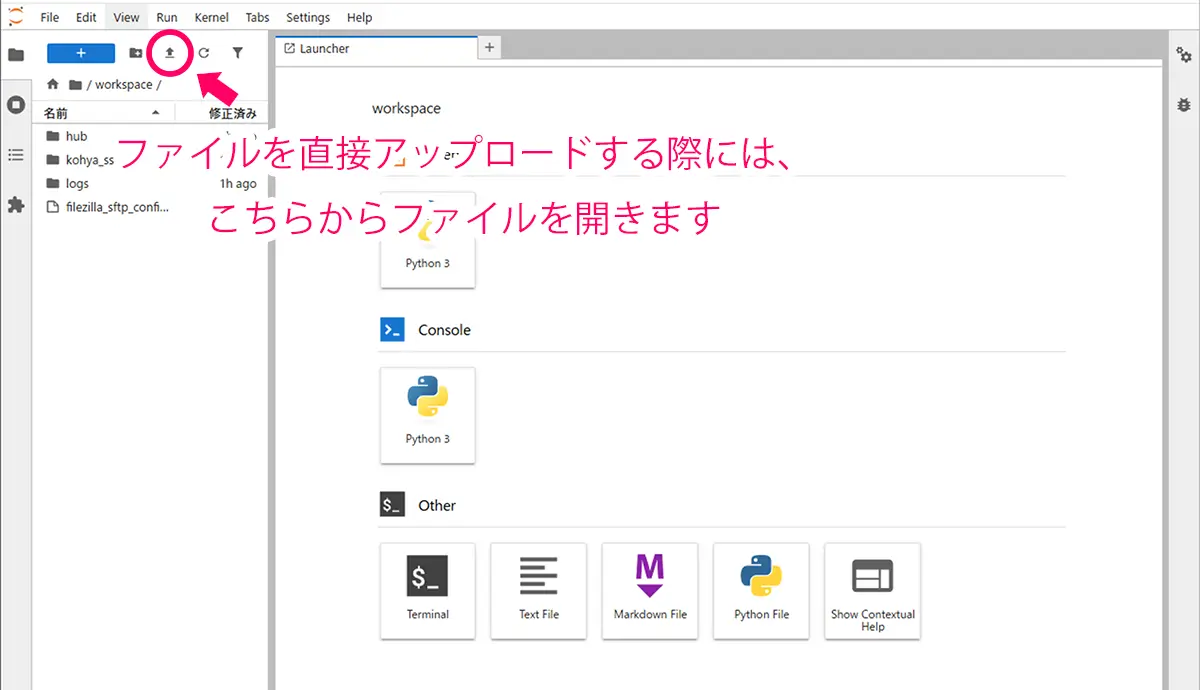
JupiterLabでのファイルアップロード
rcloneを使用する場合
rcloneを使用する場合は、JupiterLabのTerminalからファイル転送します。
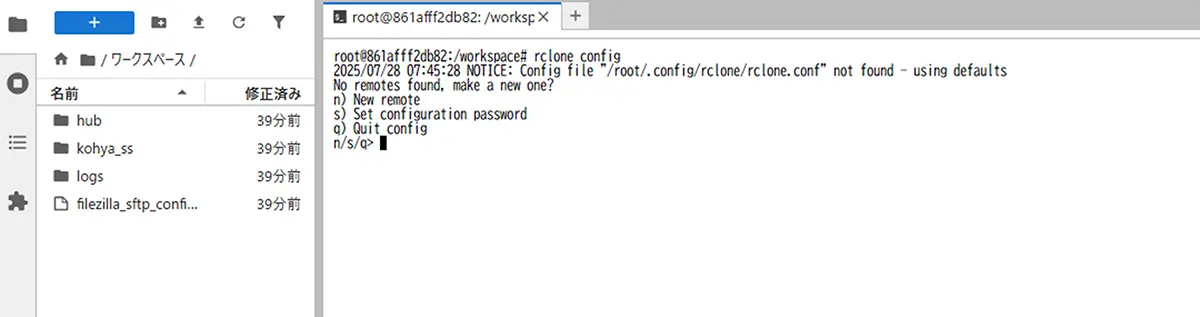
ターミナルで、以下のコマンドを実行し対話形式で設定します。
rclone configrcloneの設定の詳細は、以下の記事をご覧ください。
あわせて読みたい
【rclone(アールクローン)】の使い方・クラウド×ローカル【ファイル転送・同期・バックアップ】方法 ローカルPCとクラウド rcloneとは、クラウドストレージとローカル/サーバー間で、ファイルをアップロード/ダウンロード/同期/暗号化などができるツールです。ローカル ↔…
workspaceでフォルダを管理する
フォルダの管理には、JupiterLabよりcodesaver(=workspace)(7777)が適しています。
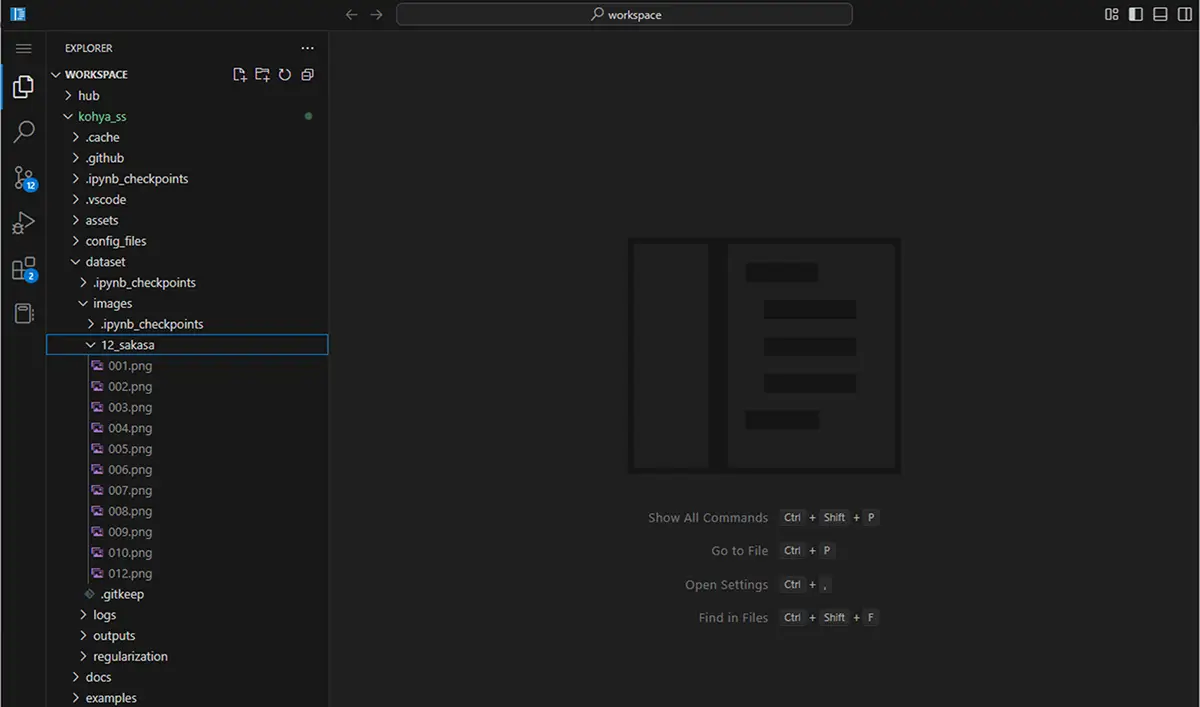
先程、JupiterLabのアップローダーでアップロードしたファイルが反映されている事を確認しましょう。
LoRA学習の際のフォルダパス
【フォルダ名について】フォルダ名は、<繰り返し回数>_<class>で構成する必要があります。
classとは、「この画像が何を表しているのか」をモデルに伝えるための“タグ(単語)”です。Kohya_ssでは、画像ファイルのフォルダ名を自動的に使って、プロンプトとして学習に利用します。
フォルダ名に関してはこちらの記事で書いています。
あわせて読みたい
LoRAとは?仕組み・学習・使い方・学習パラメータまで【LoRA完全ガイド】 LoRAとは何か? LoRAとは、Low-Rank Adaptation(低ランク適応)の略で、大規模なモデル(例:Stable Diffusion)の重みをすべて再学習するのではなく、一部だけを効率…
上のworkspaceの画像では、以下の様になっています。
workspace\kohya_ss\
├──dataset\ ← データ系(学習素材)
│ ├── 12_sakasa\
│ │ ├── img\ 以下の配置がデフォルトになっている。(どちらでもいい)
workspace\kohya_ss\
├──dataset\ ← データ系(学習素材)
├── 12_sakasa\
├img学習モデルの選択・設置
デフォルトでは、runwayml/stable-diffusion-v1-5が使用されます。学習のベースとするモデルを事前に決めている場合は、
- ベースモデル(例:
sd15やSDXL)は/workspace/modelsなどにアップロードします。 - 必要に応じて、
JupiterLab、rcloneやRunPod File Uploaderでアップロード。
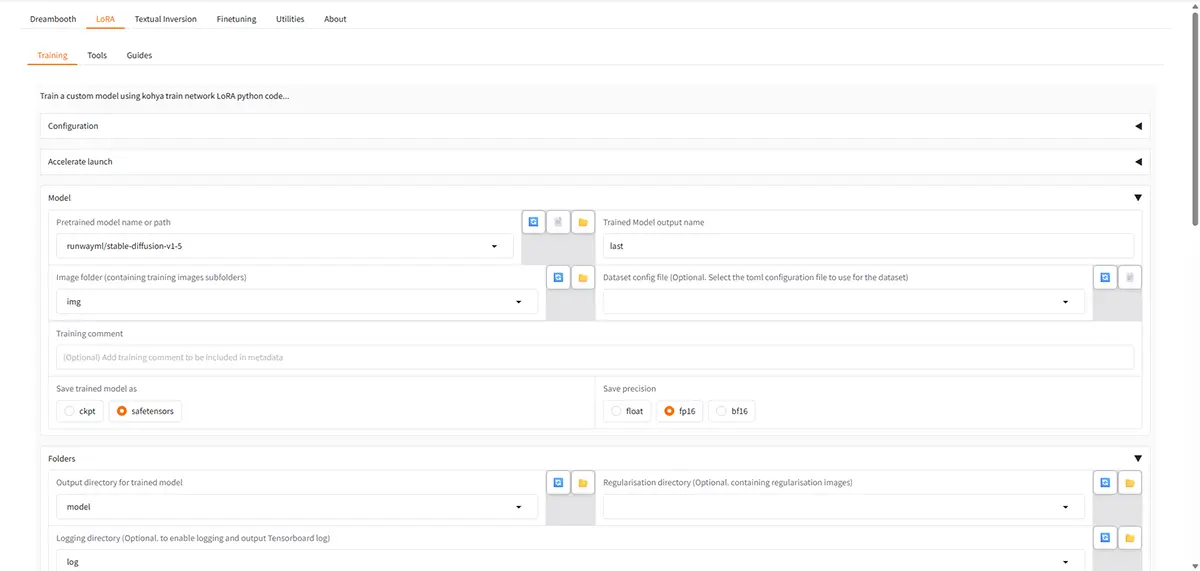
④:LoRAの学習を始める基本ステップ
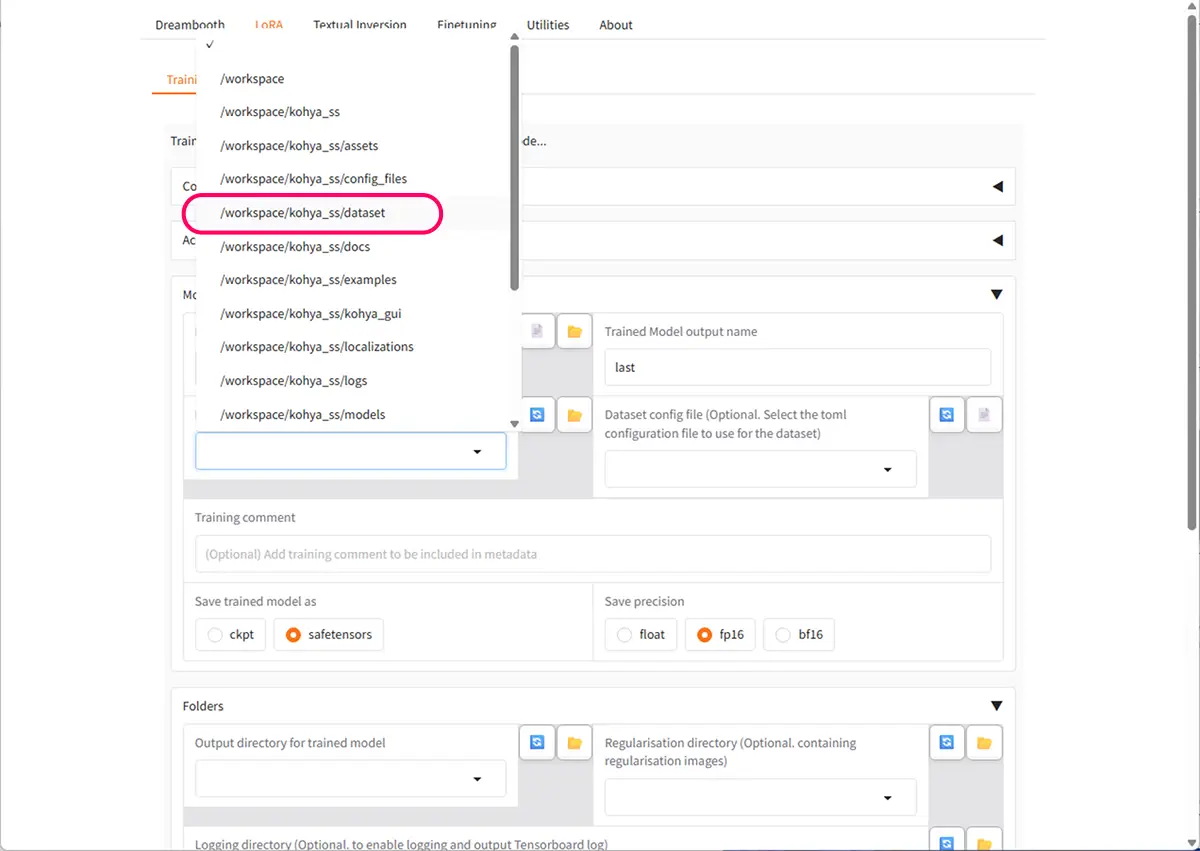
Kohya_ss GUIで学習設定を行なっていきます。上から、LoRA➡Trainingを選択し、学習用フォルダを選択します。
ここでは、ファイルが入ったフォルダ(ここでは12_sakasa)の親フォルダを選択します。(12_sakasaの親フォルダはdatasetですね。)
Prepare Dataset- 画像フォルダを指定し、captionファイル(
caption.txtや.json)を自動生成可能 BLIPやDeepBooruのキャプション方式を選べる
- 画像フォルダを指定し、captionファイル(
TrainLoRAを選択- 各種設定(model選択、学習率、バッチサイズなど)を入力
- 下部の「Start Training」をクリックで学習開始
- 学習ファイルの保存場所
/workspaceまたは/workspace/output以下に出力される(テンプレにより多少異なる)
LoRA学習の設定項目に関してはこちらの記事をご覧ください。
あわせて読みたい
LoRAとは?仕組み・学習・使い方・学習パラメータまで【LoRA完全ガイド】 LoRAとは何か? LoRAとは、Low-Rank Adaptation(低ランク適応)の略で、大規模なモデル(例:Stable Diffusion)の重みをすべて再学習するのではなく、一部だけを効率…
このテンプレートにおけるJupyter Notebookの主な使い道
① 学習用データの前処理(GUIではやりにくい処理)
- ファイル名の一括リネーム
- キャプションファイル(
caption.txtや.json)の生成や変換 - 特定の画像のみを抽出・削除(NSFW除外やファイルサイズ制限など)
BLIPやdeepbooruのキャプション抽出をPythonコードでカスタマイズ
GUIでは「Prepare Dataset」で自動処理できますが、より細かいルールで前処理したい場合はNotebookが便利です。
② 自動学習スクリプトの実行・テスト
- 複数パターンのLoRA学習をバッチで回す
- 設定ファイル(
*.json)の自動生成 - Kohyaスクリプト(例:
train_network.py)をコードで直接呼び出す
→ GUIを介さずに学習の制御ができる(Colabと同じ使い方)
特に複数LoRAを学習するようなプロジェクトにはJupyterが効率的です。
③ 学習のログ解析やグラフ可視化
- 学習中に出力される
lossやepochなどのログをグラフ化 - エポックごとの出力画像を比較・確認
- 精度チェック(FIDスコアなど)
GUI上では確認できない詳細な学習分析ができます。
④ 変換・マージ・モデル管理ツールのスクリプト実行
- LoRAモデルのmerge(例:
merge_lora.py) - safetensors → .ckptなど形式変換
- 特定フォルダ内のモデルをまとめて変換・整理
GUIの「Utilities」でも一部できますが、複数処理や条件付き処理にはNotebookが便利。
⑤ ストレージ管理・アップロード処理(rclone連携)
- Google DriveやOneDriveとの接続確認&ファイル移動
rcloneコマンドのスクリプト化(バックアップ、同期など)- ファイルの自動整理(出力が増えすぎた場合の削除や整理)
| GUIだけでOKな作業 | Notebookが便利な作業 |
|---|---|
| 単体LoRAの学習 | 複数モデルの一括学習 |
| 簡単な前処理 | 条件付き前処理や細かい操作 |
| モデルmerge(手動) | まとめて変換や一括管理 |
| 学習の実行 | 学習ログの分析・可視化 |
| FileUploaderでアップ | 自動アップロードやrclone管理 |
/workspace/ ← 作業エリア(メインの保管場所)
/hub ← Jupyterシステム用(触らなくてOK)
/Kohya_ss ← Kohyaスクリプト一式(GUI/WebUIの本体)
/log ← ログ(Jupyterや起動関連のログが出る)
filezilla_sftp_config.xml ← SFTP設定ファイル(通常不要)テンプレート内の /Kohya_ss フォルダの中にすでに
/Kohya_ss/
├── models/
├── output/が存在している.
Kohya_ss GUIで自動的に参照されるのは /Kohya_ss/models や /Kohya_ss/output なので、次のような使い方がベストです.
「モデルの読み込み」
→ models フォルダは /Kohya_ss/models/ を選ぶのが自然
「出力先」
→ 何もしなければ /Kohya_ss/output/ に保存される
「学習用画像フォルダ」
→datasetフォルダに配置するか、
→ /train フォルダを作成して、指定。
Inference(テスト出力)
Diffusers(Stable DiffusionのPythonライブラリ)を使えば、GUIではなくコードでテスト画像を生成できる。
LoRA学習後、学習内容を試すために 画像を生成(推論) することができます。
その際、Diffusers を使うと コードベースで画像出力が可能になります。
RunPodの「Kohya_ss GUI RTX 5090」テンプレのように、Kohya_ss GUI(Web UI)とJupyter Notebookが両方入っている環境では、GUIだけで完結できる作業も多いですが、Jupyter Notebookを使うとより柔軟に制御・自動化・検証ができる場面があります。
| GUI(Kohya_ss)だけでできること | Notebookを使うとできること |
|---|---|
| LoRAの学習・設定 | Diffusersによる画像生成や評価 |
| データセット選択・学習実行 | 複数実験の一括実行や自動化処理 |
| 学習結果の出力 | rcloneによるアップロードなど |
あわせて読みたい
RunPodの【Podの見方と使い方】と【接続オプションの使い方】【⓪基礎・1.Pod編】 RunPodの大まかな使用方法、流れは こちらの記事でまとめています。 ”RunPodの使用方法と手順”については、上の記事でかなり細かくまとめたつもりでいました。しかし、…
SAKASA AI
RunPod×Kohya_ss GUI|GPU非対応の原因・互換表まとめ【⓪基礎 2.GPU編】 | SAKASA AI RunPodでKohya_ssを使ってLoRAを学習する際のポイントを初心者向けに解説!テンプレート選びや画像アップロード、WebUI操作から永続ストレージ管理まで、迷わず学べる手順…
SAKASA AI
「RunPodでのJupyterLabの使い方:workspaceとの違いも解説」【⓪基礎・3.JupyterLab編】 | SAKASA AI RunPodのテンプレート内の「Jupyter Notebook」。そもそも何のために使うのか?workspaceとの違い、GPUとの関係、画像生成で使う必要があるのか?など…初心者にもわかりや…
【1⃣解説編】
クラウドGPU”RunPod”とは?画像生成・LoRA学習の最適解?!個人利用の効率よいクラウド環境【①解説編】 ComfyUI、Stable Diffusionなどの画像生成も使いやすい Stable Diffusionで「思う存分、画像,動画生成がしたい」「自分の作風を学習させたい」「LoRAやDreamBoothを試し…
【2⃣実践編】
【RunPodの料金と使い方】Stable Diffusionなどで画像生成やLoRA学習をする方法【②実践編】 RunpodでStable Diffusion系画像生成やLoRA学習をする方法 Stable DiffusionやLoRA学習では、長時間GPUをフル稼働させるため、発熱や電源の安定性が大きな課題になりま…
【3⃣応用編】
【RunPod】で”Kohya_ss”を使用して”LoRA学習”をする方法【③応用編】 本記事では、クラウドGPUのRunPod内で、 ”Kohya_ss”のテンプレートを使用して、”LoRA学習”をする方法を解説しています。 RunPodの基本的な使用方法については、 こちら…